



Our Fundraiser and getting ready for the MATE competition!
On March 16th, our team hosted a game day fundraiser. We had pizza, salad, and turkey for our friends to munch on, while others played gaga ball, volleyball, and card games. Everyone had a blast, and we hope to host another one in the fall! We raised more than our team had expected that to raise, which was an awesome surprise after we worked very hard to get everything planned and set up. Our team recruited 2 new members that day who have jumped in and we now have an amazing photographer as well as a great social media helper.
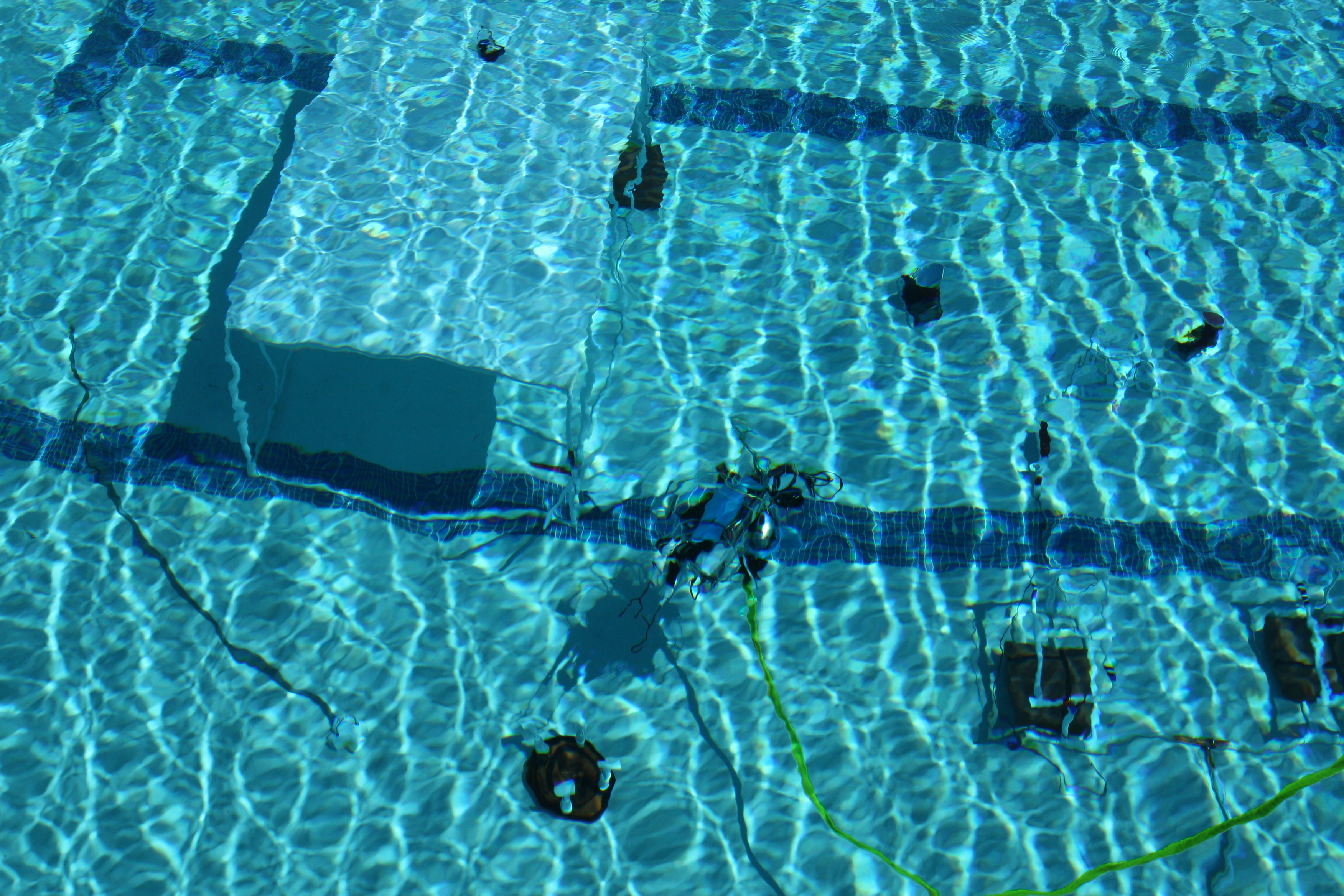
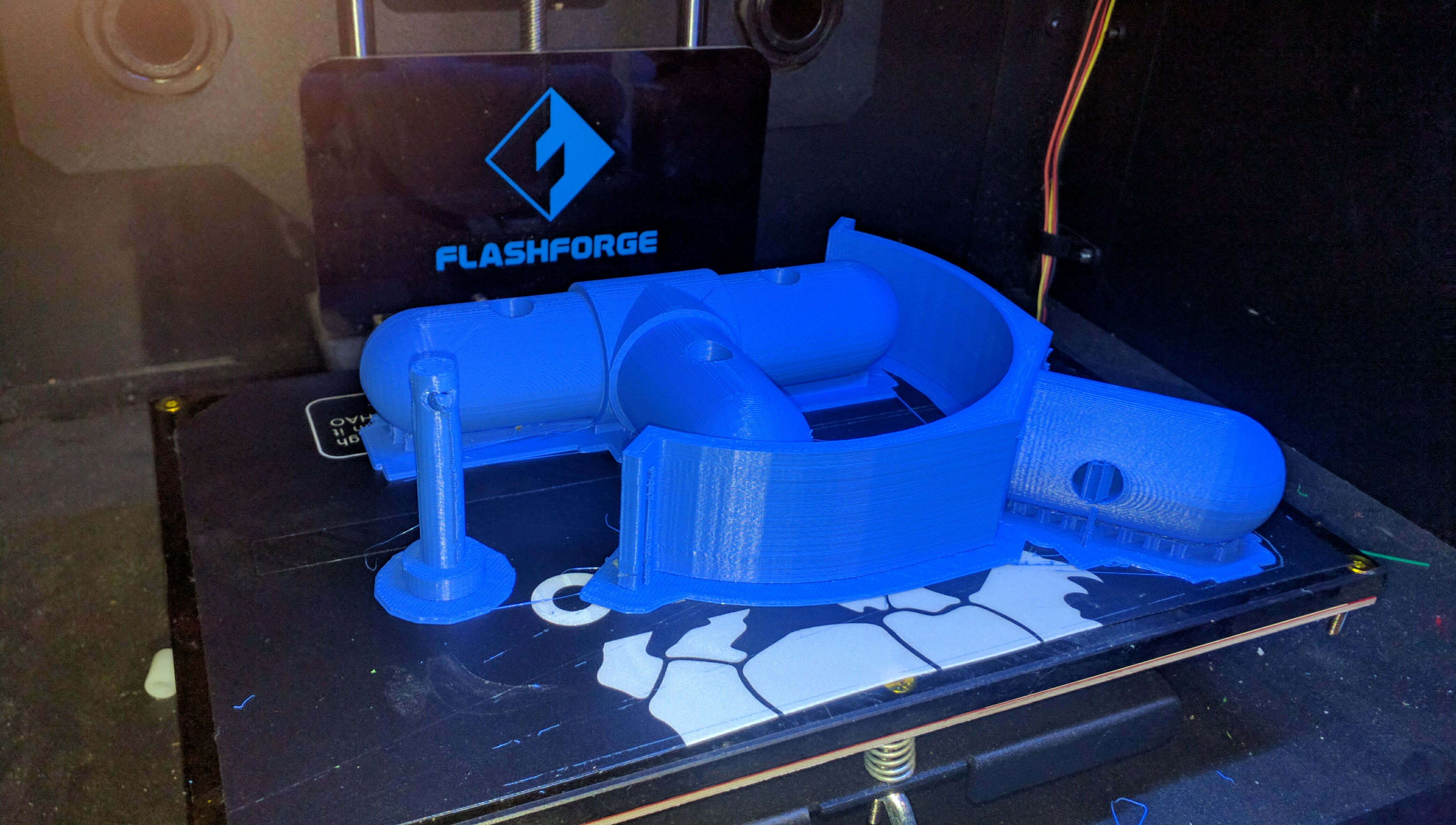
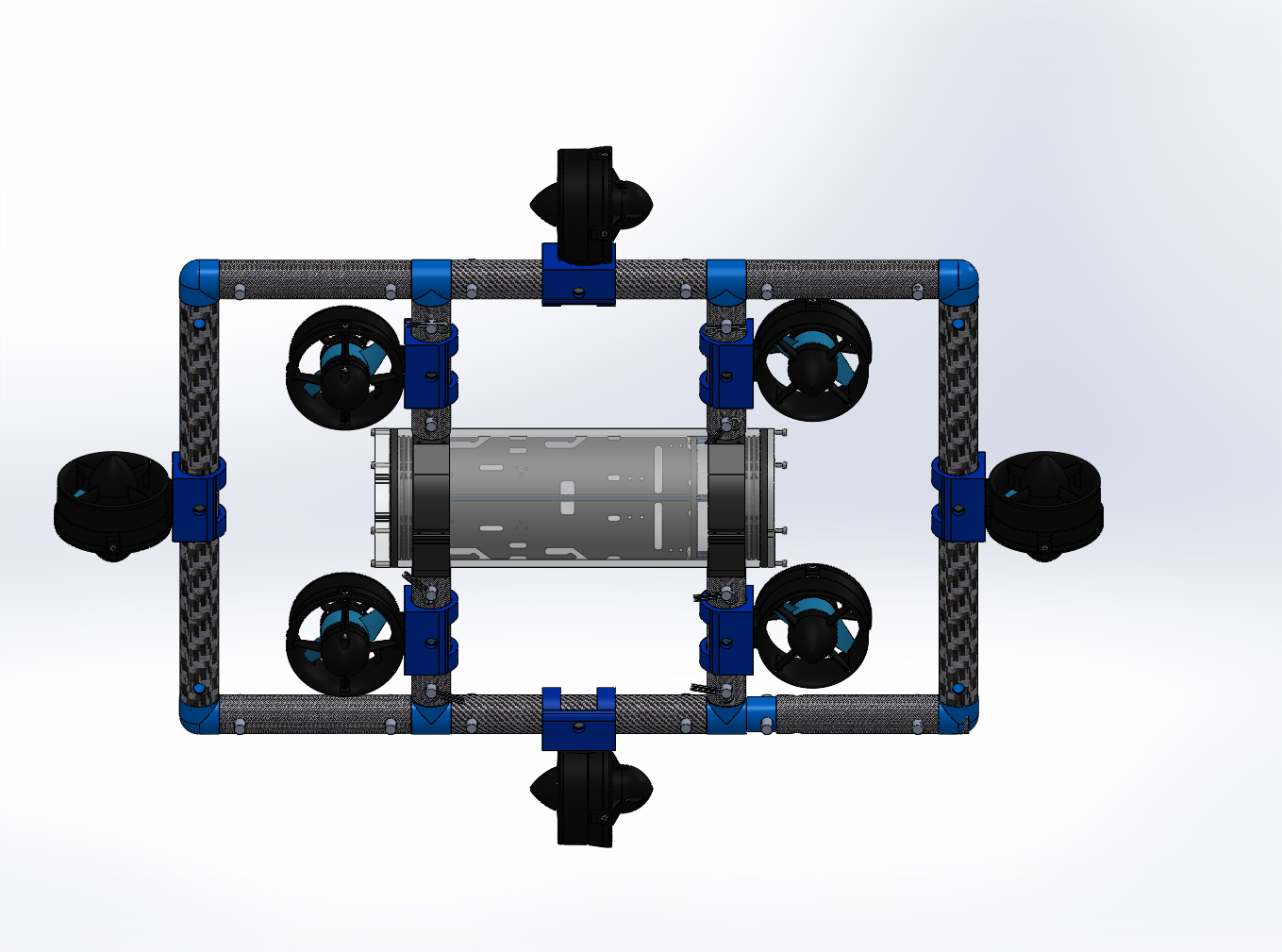
Also, we are counting down the days until the competition: 4 weeks or exactly 28 days or 672 hours. The team is scrambling to get the last minute details and programming done on the carbonAurelia. We are busy working on getting our camera's to identify shapes underwater and overlay the writing over the picture of the shapes. After a little trouble our programmer got to the root of the issue and now the program can recognize the shapes easily! In addition, we have been working on water proofing our motors for our micro ROV and claw. We recently just built a enclosure for our IP cameras so that we can save money instead of buy expensive waterproof cameras. We have also been working on the tools that we need to complete the underwater course. Each year the competition and its goals are different. This year, there are some challenging tasks which we have been able to brainstorm on, and some we have conquered. For example, in the competition we have to transport and release Trout Fry ( simulated by fishing lures) and we had to figure out a easy way to transport them and release them into a designated area on the bottom of the pool. It took us a couple of meeting of tossing around ideas until we finally drew up an idea and in less than the 30 minutes we had a working prototype that only needs a couple tweaks to make it final. Also, we have to determine the lift capability of our ROV before the competition as well as measuring the length of a Civil War Era cannon both of which we are still brainstorming for.
Lastly, the team made a last minute decision to change our tether to fiber optic cabling that will help us send data to the places to our ROV and help move ability due to its small size. Fiber optic cable is made up of tiny glass threads which reflect back rapid pulses of light to conduct data. We have been extending our meeting a little longer so we can make sure we get everything accomplished that needs to be accomplished. Everyone on our team is always doing something whether it be a small project or a big project. I know that we can always count on each other to get something completed. We aren't always perfect and sometimes our meeting have little bunny trails to other things that we talk about but everyone is always ready to jump in and work or teach others that don’t know.
-SubSea Rovers